diff --git a/README.md b/README.md
index 5099b05..1999e03 100644
--- a/README.md
+++ b/README.md
@@ -77,7 +77,7 @@ Here are the required devices and wiring diagram,
- 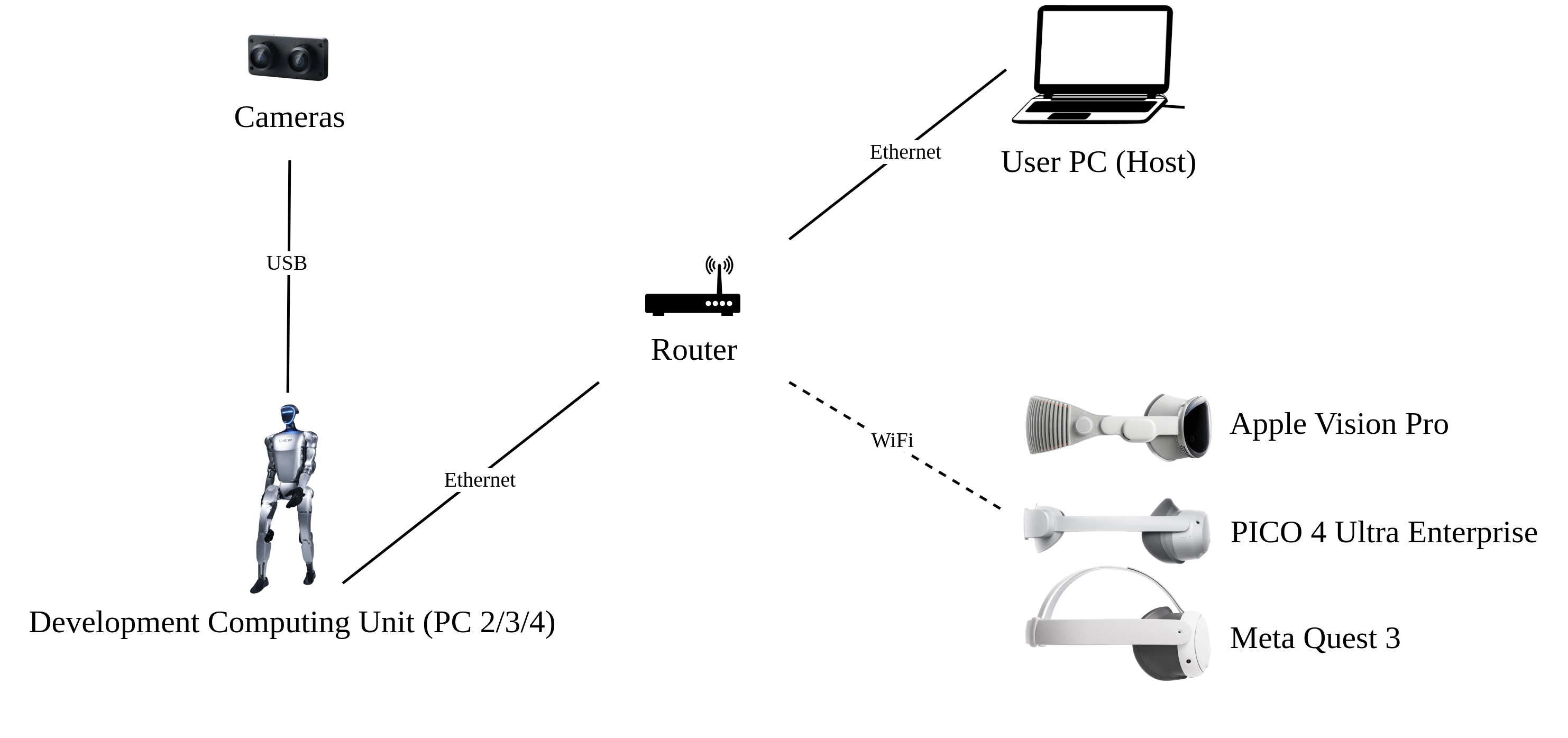 +
+
@@ -85,7 +85,7 @@ This is a network topology diagram, using the G1 robot as an example,
- 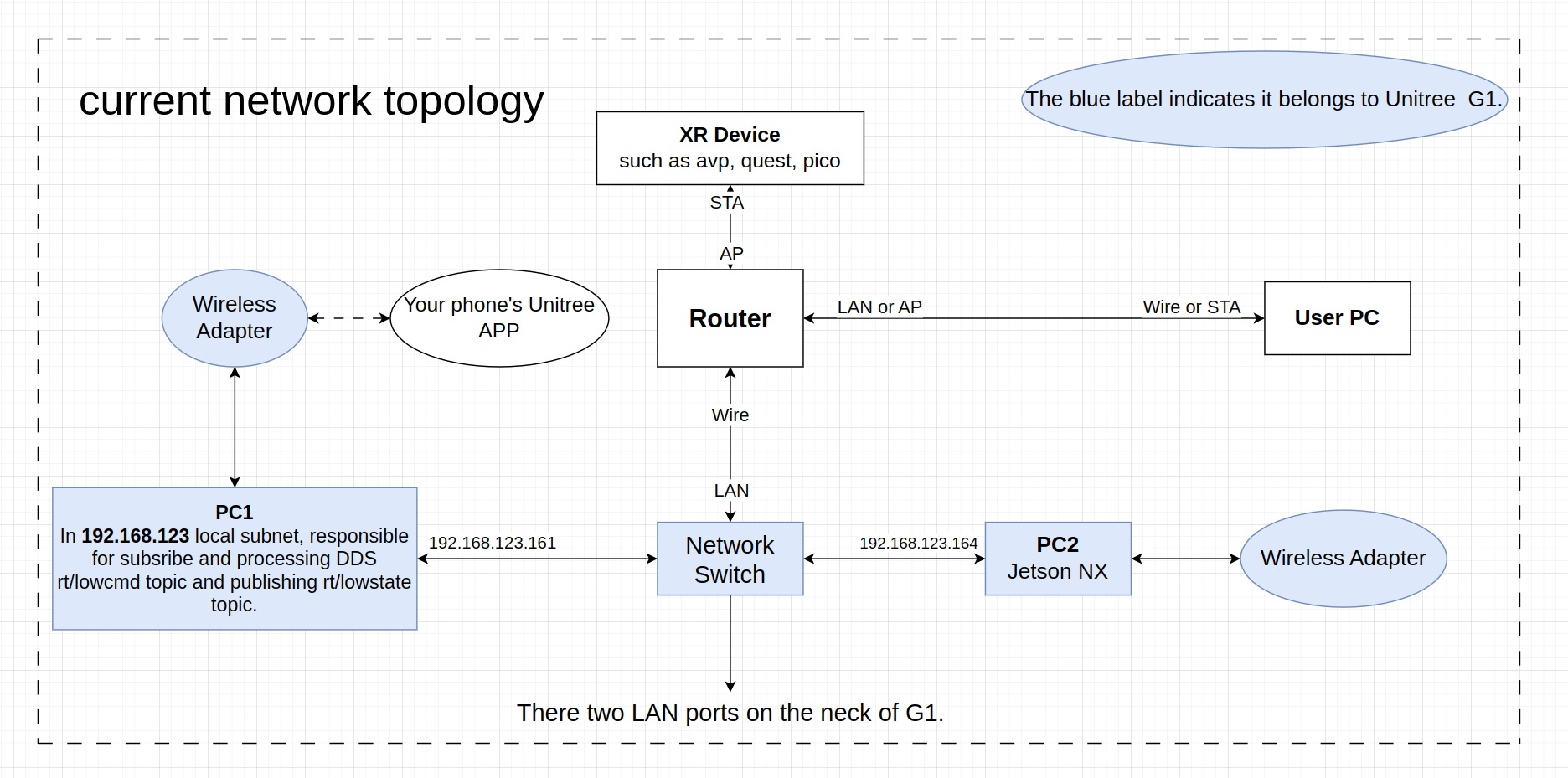 +
+
@@ -151,7 +151,7 @@ In the Ubuntu system's `~/.bashrc` file, the default configuration is: `PS1='${d
**2.2.1 Apple Vision Pro**
-does not allow WebXR on non-https connections. To test the application locally, we need to create a self-signed certificate and install it on the client. You need a ubuntu machine and a router. Connect the Apple Vision Pro and the ubuntu **Host machine** to the same router.
+Apple does not allow WebXR on non-https connections. To test the application locally, we need to create a self-signed certificate and install it on the client. You need a ubuntu machine and a router. Connect the Apple Vision Pro and the ubuntu **Host machine** to the same router.
1. install mkcert: https://github.com/FiloSottile/mkcert
2. check **Host machine** local ip address:
@@ -380,7 +380,7 @@ avp_teleoperate/
│ │ ├── episode_writer.py [Used to record data for imitation learning]
│ │ ├── mat_tool.py [Some small math tools]
│ │ ├── weighted_moving_filter.py [For filtering joint data]
-| | ├── rerun_visualizer.py [For visualizing data during recording]
+│ │ ├── rerun_visualizer.py [For visualizing data during recording]
│ │
│ │──teleop_hand_and_arm.py [Startup execution code for teleoperation]
```
diff --git a/README_ja-JP.md b/README_ja-JP.md
index b112127..2edb0ed 100644
--- a/README_ja-JP.md
+++ b/README_ja-JP.md
@@ -74,7 +74,7 @@
-
+
@@ -82,7 +82,7 @@
-
+
diff --git a/README_zh-CN.md b/README_zh-CN.md
index cfc05be..448195a 100644
--- a/README_zh-CN.md
+++ b/README_zh-CN.md
@@ -31,7 +31,7 @@
# 0. 📖 介绍
-该仓库实现了使用 **Apple Vision Pro** 对 **宇树(Unitree)人形机器人** 的遥操作控制。
+该仓库实现了使用 **XR设备**(比如 Apple Vision Pro、PICO 4 Ultra Enterprise 或 Meta Quest 3) 对 **宇树(Unitree)人形机器人** 的遥操作控制。
以下是本仓库目前支持的机器人类型:
@@ -76,7 +76,7 @@
- 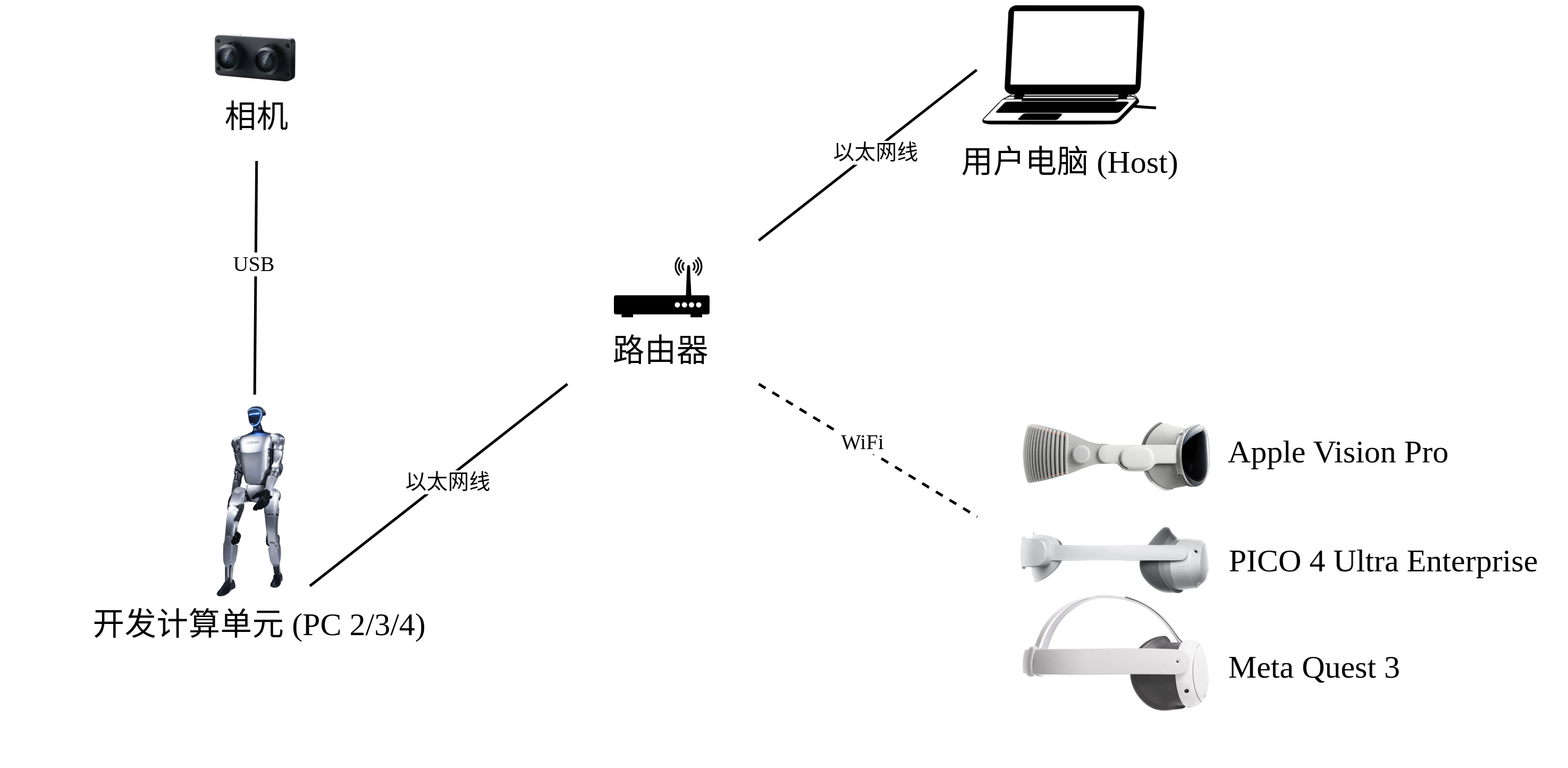 +
+
@@ -84,7 +84,7 @@
-
+
@@ -376,7 +376,7 @@ avp_teleoperate/
│ │ ├── episode_writer.py [用于记录模仿学习的数据]
│ │ ├── mat_tool.py [一些小的数学工具]
│ │ ├── weighted_moving_filter.py [用于过滤关节数据的滤波器]
-| | ├── rerun_visualizer.py [用于可视化录制数据]
+│ │ ├── rerun_visualizer.py [用于可视化录制数据]
│ │
│ │──teleop_hand_and_arm.py [遥操作的启动执行代码]
```