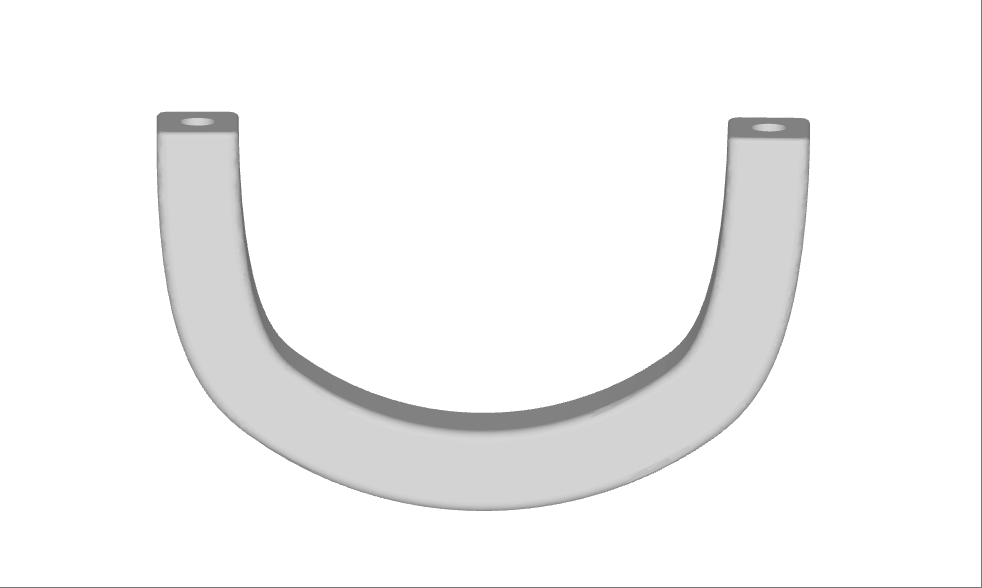
经典版头部(98mm)

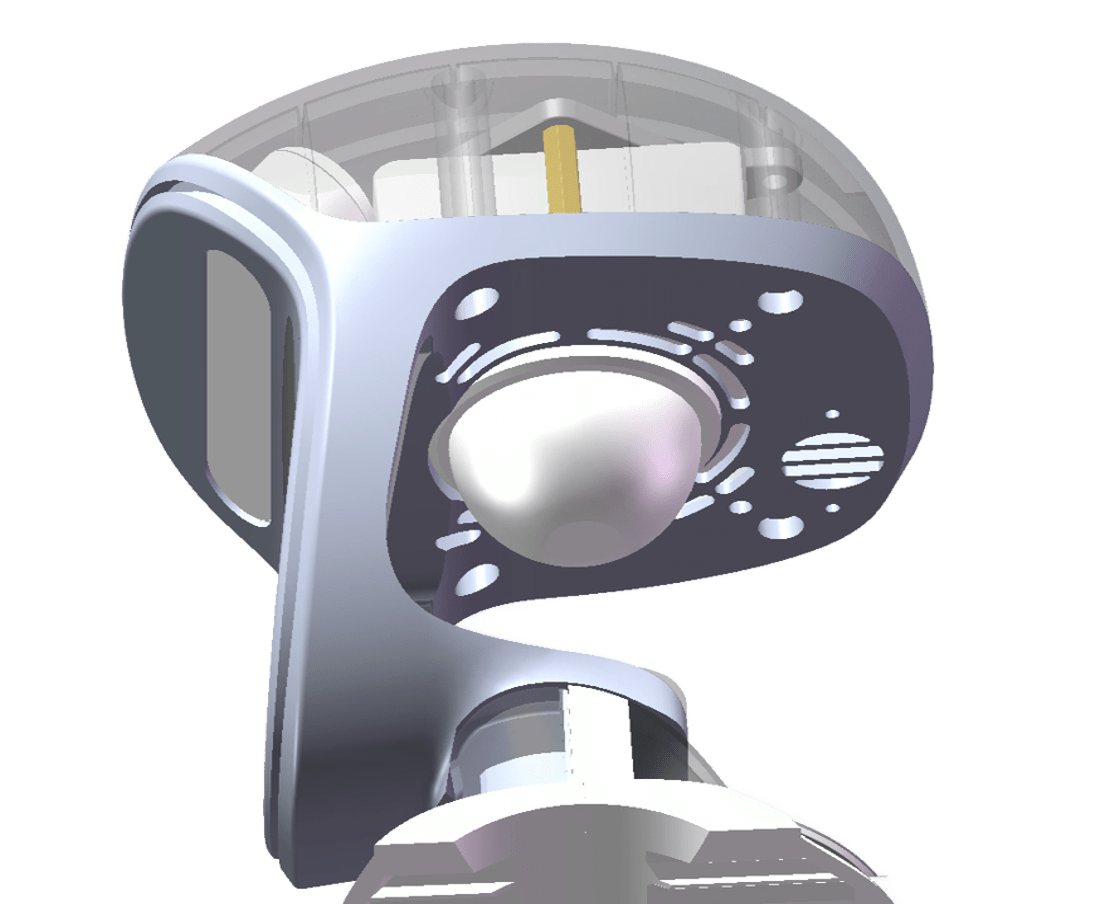
焕新版头部(88mm)
| 项目 | 数量 | 规格 | 备注 |
|---|---|---|---|
| 宇树通用人形机器人 G1 | 1 | https://www.unitree.com/cn/g1 | 需选配开发计算单元版本 |
| XR 设备 | 1 |
apple-vision-pro pico4-ultra-enterprise quest-3 quest-3s |
Please Refer Our WiKi [XR_Device] |
| 路由器 | 1 | 推荐至少支持 WiFi6 | 常规模式必须,无线模式可选。 |
| 用户电脑 | 1 | 推荐 x86-64 架构 | 仿真模式下请使用 NVIDIA 官方推荐 的硬件资源进行部署使用 |
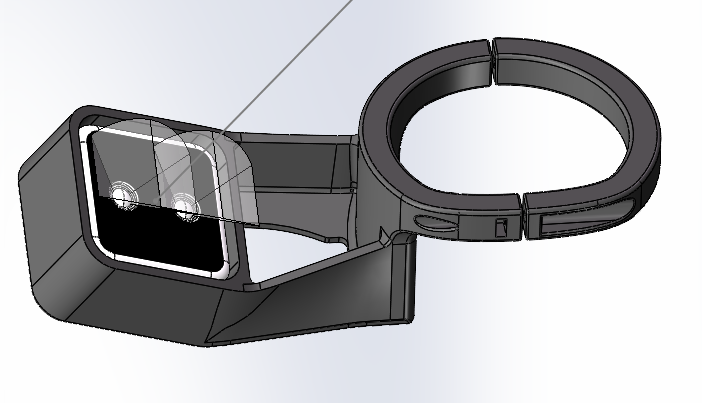
| 头部相机 | 1 |
单目相机(机器人内置 Realsense D435i) 双目相机(支架外置,详情见5.2节表格) |
用于机器人头部视野,双目相机更有沉浸感。 使用 image_server 文件驱动 |
| USB3.0 数据线 | 1 | 双直头Type-C,长度0.2米左右 | 用于连接头部双目相机 |
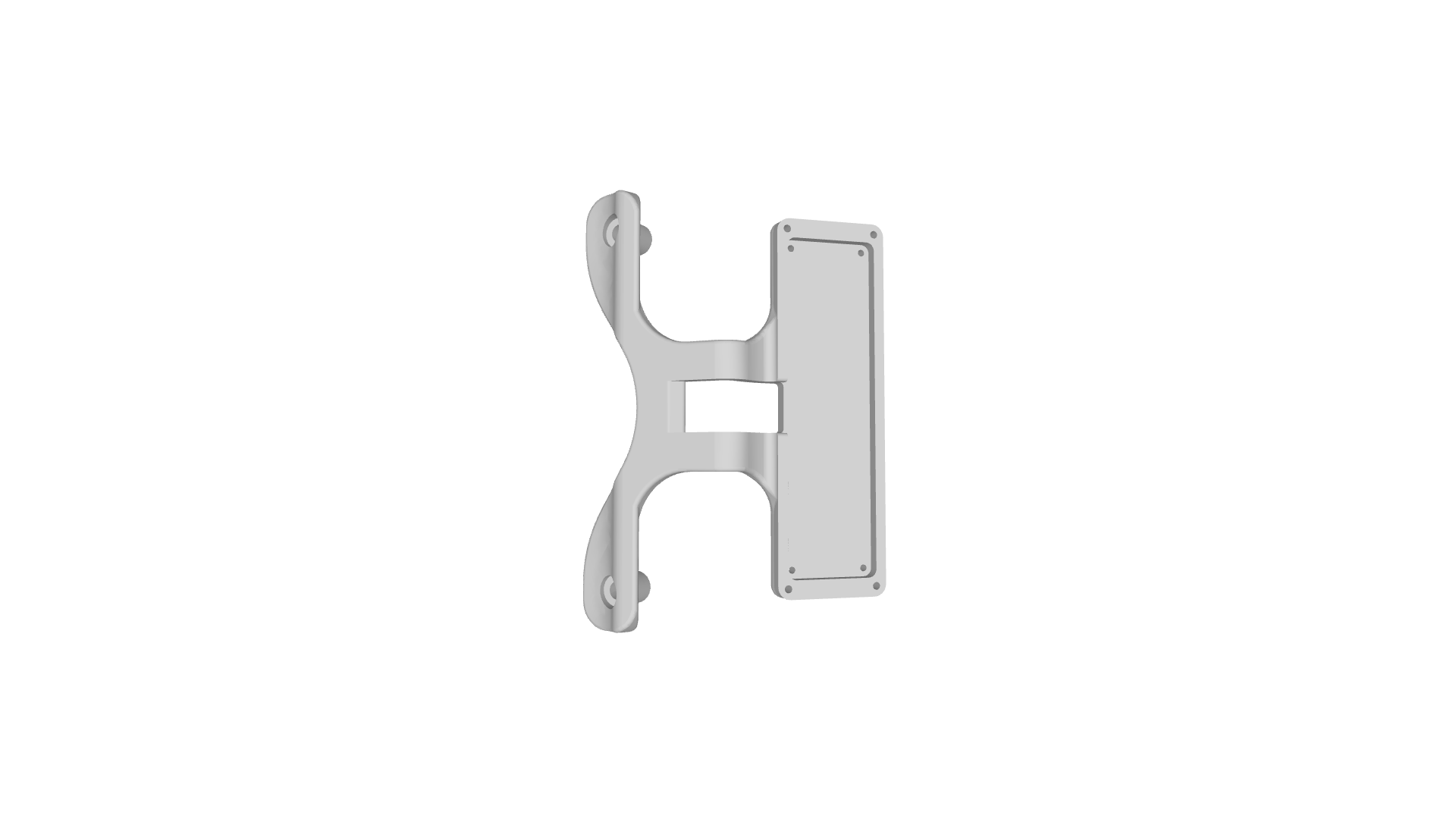
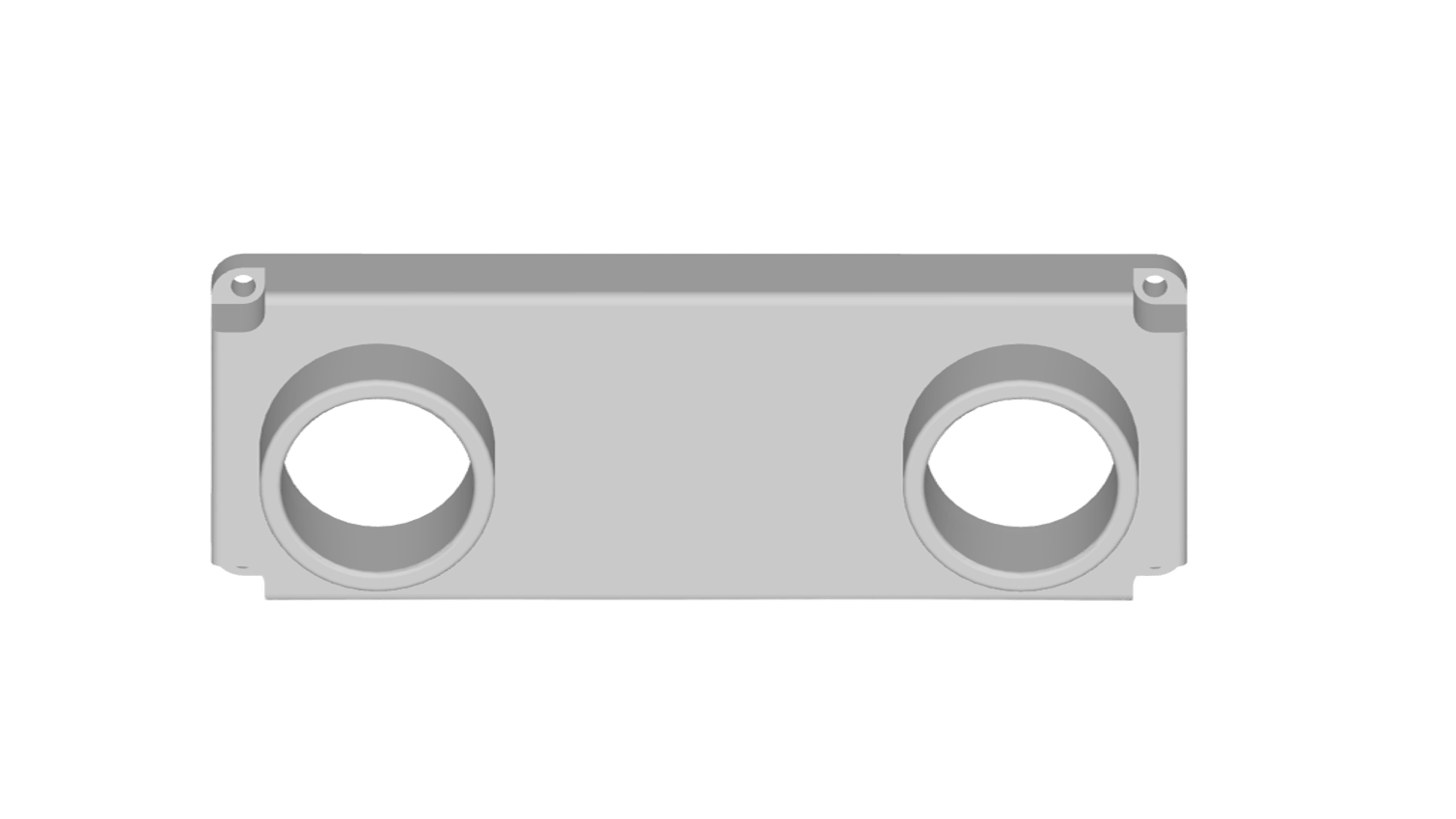
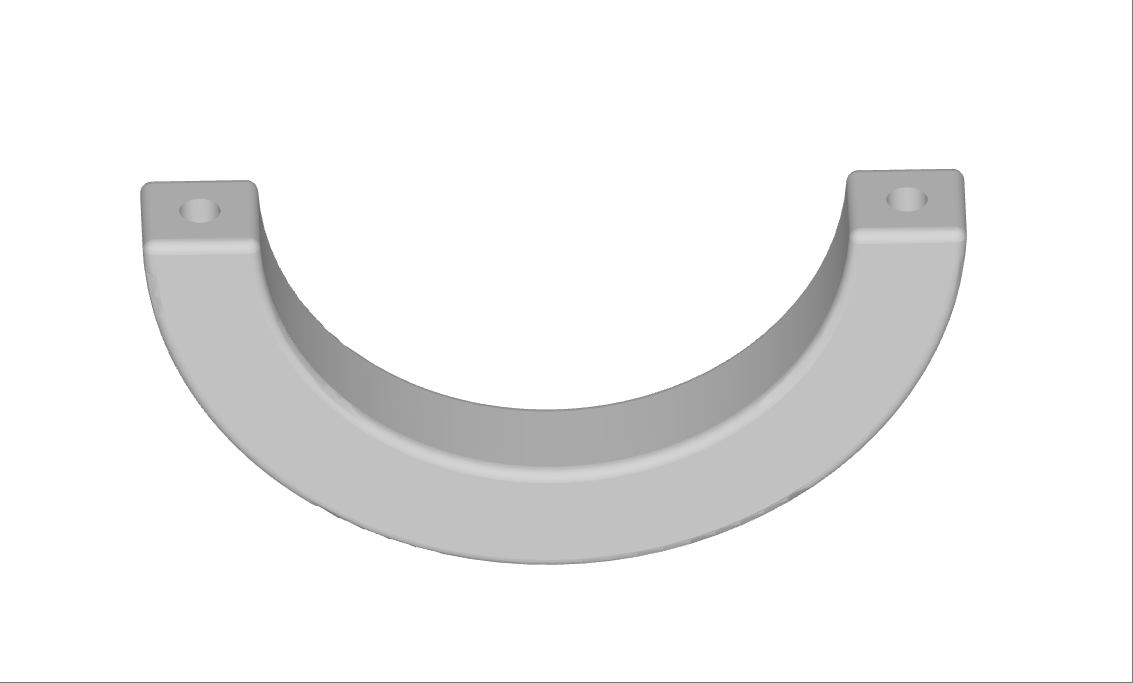
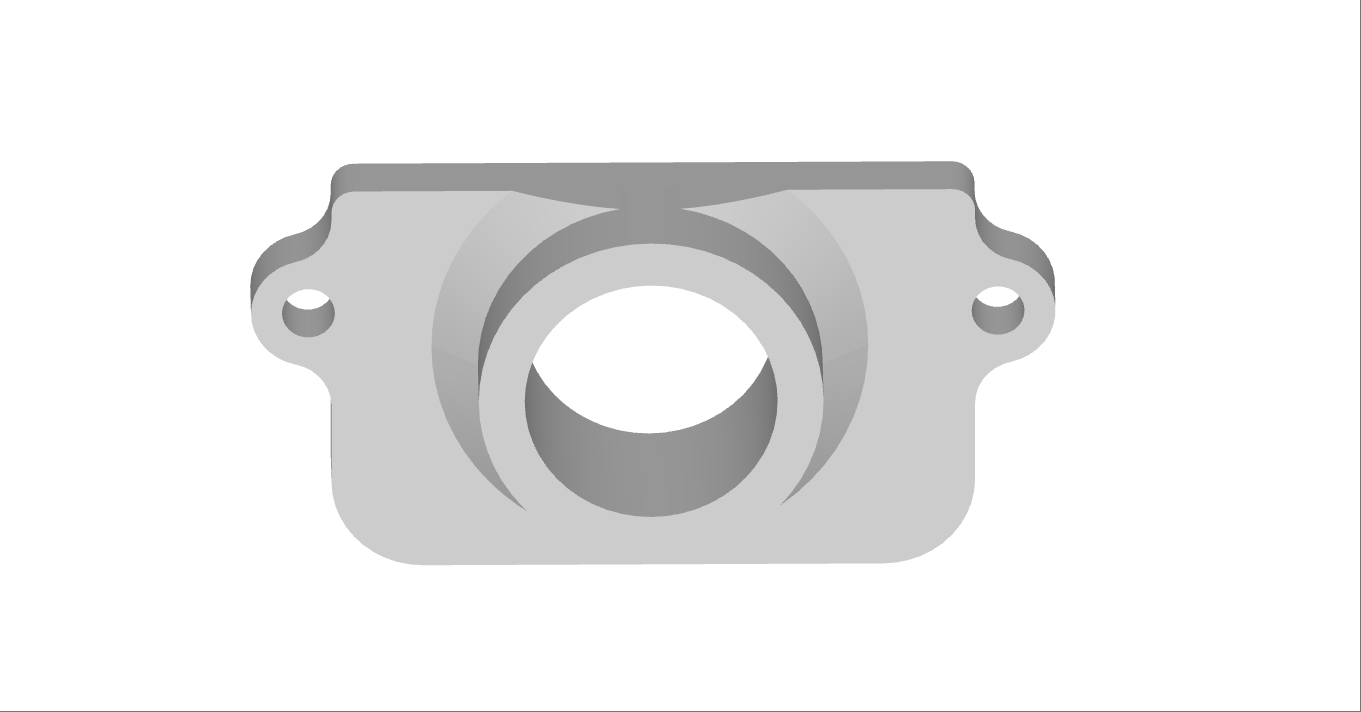
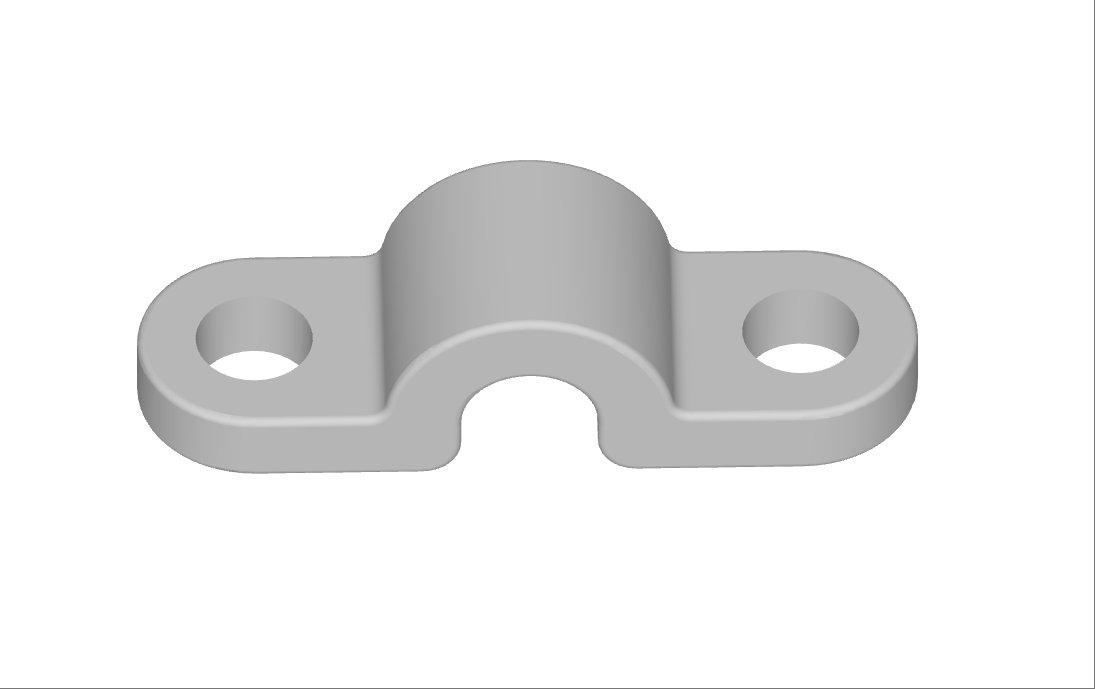
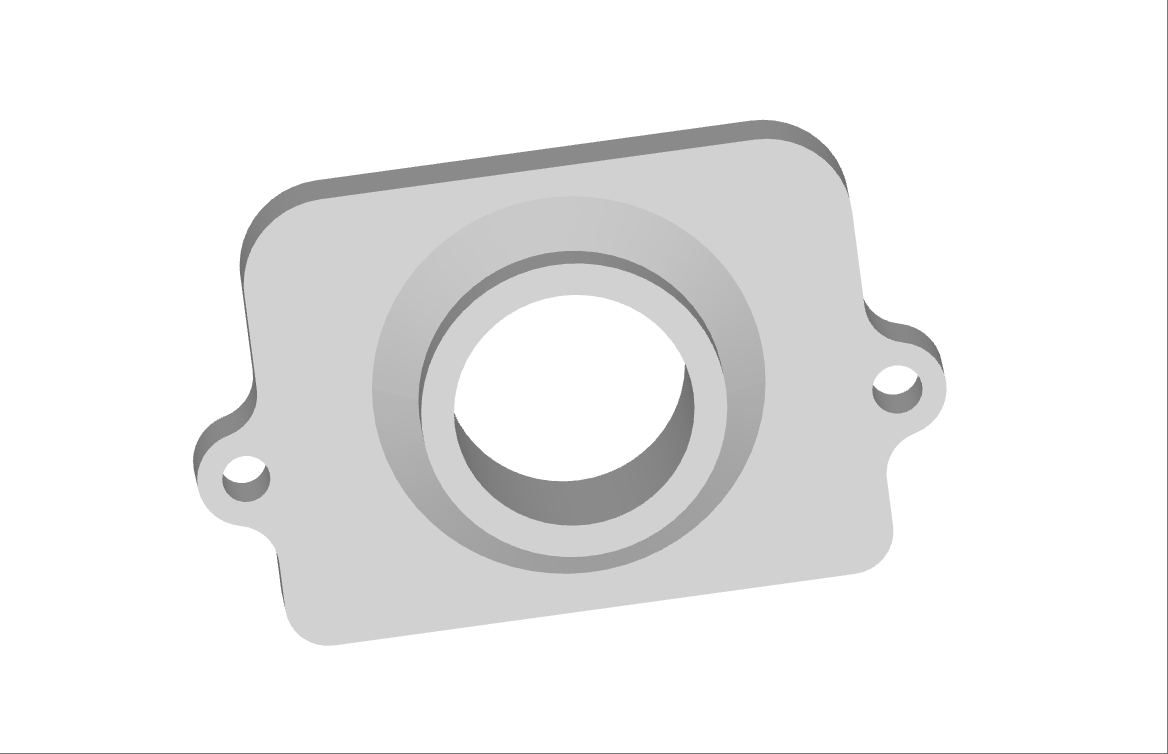
| 项目 | 相机支架 | 相机盖板 | USB-Type-C 压块 | 下载链接 |
|---|---|---|---|---|
|
经典版头部(98mm) |
|
|
|
📥 经典版3D打印结构件 |
|
焕新版头部(88mm) |
|
|
|
📥 焕新版3D打印结构件 |
| 项目 | 相机支架 | 相机盖板 | 下载链接 |
|---|---|---|---|
|
经典版头部(98mm) |
|
无 | 📥 经典版3D打印结构件 |
|
焕新版头部(88mm) |
|
|
📥 焕新版3D打印结构件 |
| 末端执行器 | 相机支架 | 腕圈支架 | 相机盖板 | 线卡 | 下载链接 |
|---|---|---|---|---|---|
| Unitree Dex1-1 | 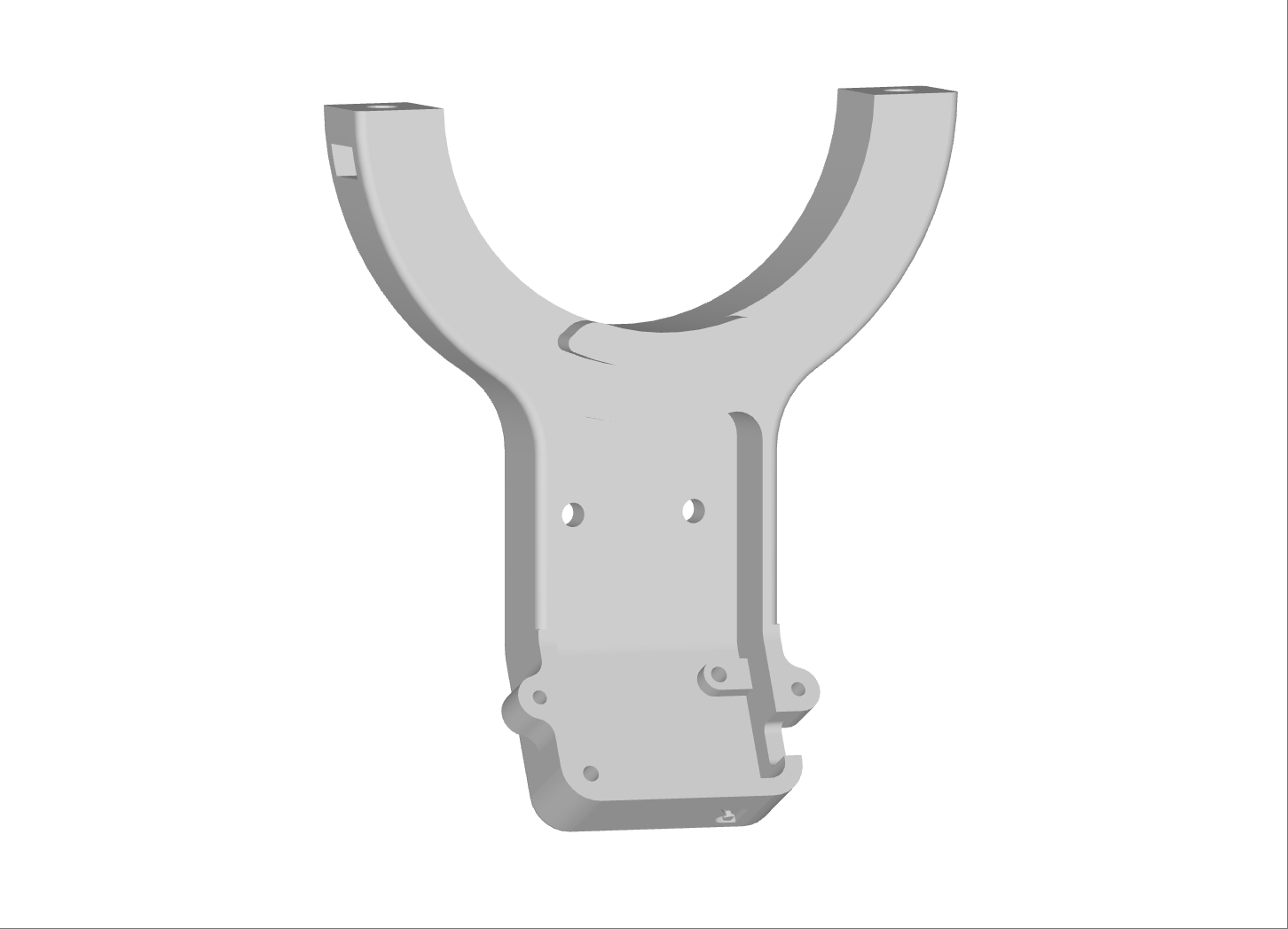 |
 |
 |
|
📥 3D打印件下载链接 |
| Unitree Dex3-1 | 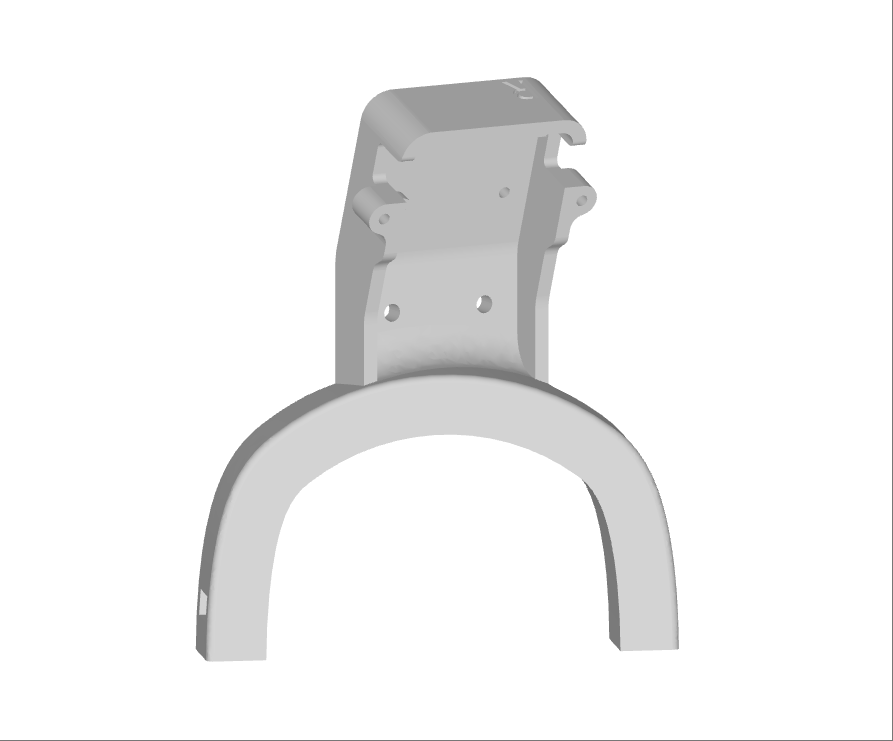 |
 |
 |
||
| Inspire DFX Hand / Brainco Hand | 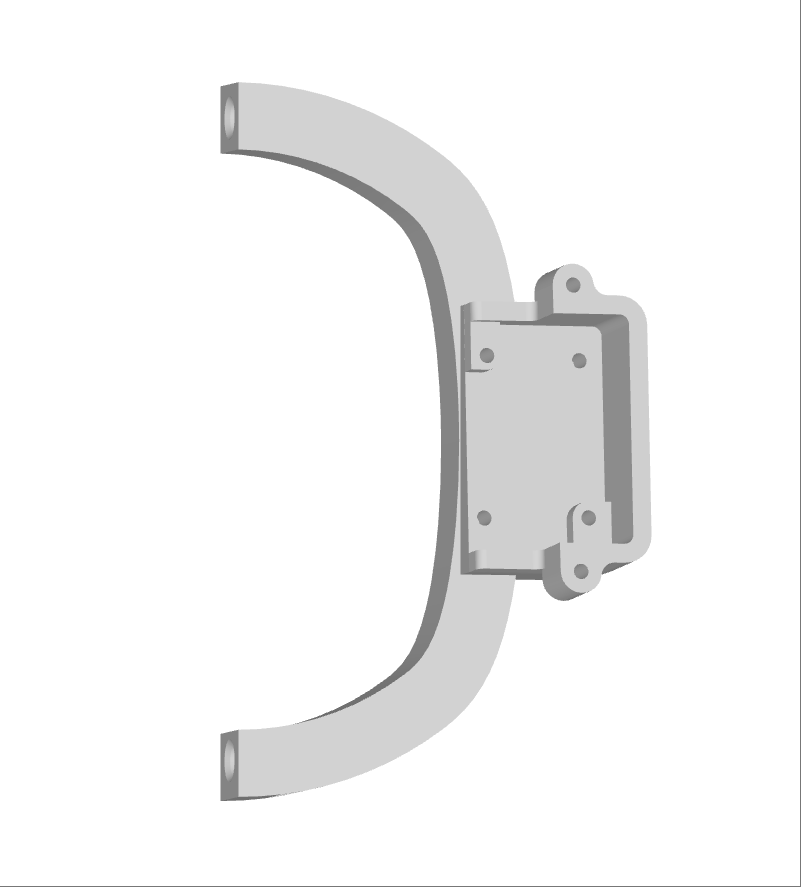 |
 |
 |
| 项目 | 仿真 | 实物 | ||
|---|---|---|---|---|
| 头部 |
|
|
|
|
| 腕部 |
|
|
|
|