10 KiB
📺 视频演示

0. 📖 介绍
该仓库实现了使用 Apple Vision Pro 对 宇树(Unitree)人形机器人 的遥操作控制。
以下是本仓库将支持的机器人类型:
| 🤖 机器人 | ⚪ 状态 |
|---|---|
| G1 (29自由度) + Dex3-1 | ✅ 完成 |
| G1 (23自由度) | ⏱ 进行中 |
| H1 (手臂4自由度) | ⏱ 进行中 |
| H1_2 (手臂7自由度) + Inspire | ⏱ 进行中 |
| ··· | ··· |
1. 📦 前置条件
我们在 Ubuntu 20.04 和 Ubuntu 22.04 上测试了我们的代码,其他操作系统可能需要不同的配置。
有关更多信息,您可以参考 官方文档 和 OpenTeleVision。
1.1 🦾 逆运动学
conda create -n tv python=3.8
conda activate tv
# 如果您使用 `pip install`,请确保 pinocchio 版本为 3.1.0
conda install pinocchio -c conda-forge
pip install meshcat
pip install casadi
1.2 🕹️ unitree_dds_wrapper
# 安装 unitree_dds_wrapper 的 Python 版本
git clone https://github.com/unitreerobotics/unitree_dds_wrapper.git
cd unitree_dds_wrapper/python
pip install -e .
注意:这是一个临时版本,未来将被 unitree_sdk2_python 取代。
2. 🛠️ TeleVision 和 Apple Vision Pro 配置
2.1 📥 基础
cd ~
git clone https://github.com/unitreerobotics/avp_teleoperate.git
cd ~/avp_teleoperate
pip install -r requirements.txt
cd act/detr && pip install -e .
2.2 🔌 本地流媒体
Apple 不允许在非 HTTPS 连接上使用 WebXR。要在本地测试应用程序,我们需要创建一个自签名证书并在客户端上安装它。您需要一台 Ubuntu 机器和一个路由器。将 Apple Vision Pro 和 Ubuntu 主机连接到同一个路由器。
- 安装 mkcert:https://github.com/FiloSottile/mkcert
- 检查主机本地 IP 地址:
ifconfig | grep inet
假设 主机 的本地 IP 地址为 192.168.123.2
注意:您可以使用
ifconfig命令检查您的 主机 IP 地址。
- 创建证书:
mkcert -install && mkcert -cert-file cert.pem -key-file key.pem 192.168.123.2 localhost 127.0.0.1
将生成的 cert.pem 和 key.pem 文件放在 teleop 目录中
cp cert.pem key.pem ~/avp_teleoperate/teleop/
- 在服务器上打开防火墙:
sudo ufw allow 8012
- 在 Apple Vision Pro 上安装 CA 证书:
mkcert -CAROOT
通过 AirDrop 将 rootCA.pem 复制到 Apple Vision Pro 并安装它。
设置 > 通用 > 关于本机 > 证书信任设置。在“启用对根证书的完全信任”下,打开对证书的信任。
设置 > 应用 > Safari > 高级 > 功能标志 > 启用 WebXR 相关功能。
2.3 🔎 测试环境
此步骤用于验证环境是否正确安装。
-
下载 Isaac Gym:https://developer.nvidia.com/isaac-gym/download
解压到当前目录,进入
IsaacGym_Preview_4_Package/isaacgym/python目录,执行命令:pip install -e . -
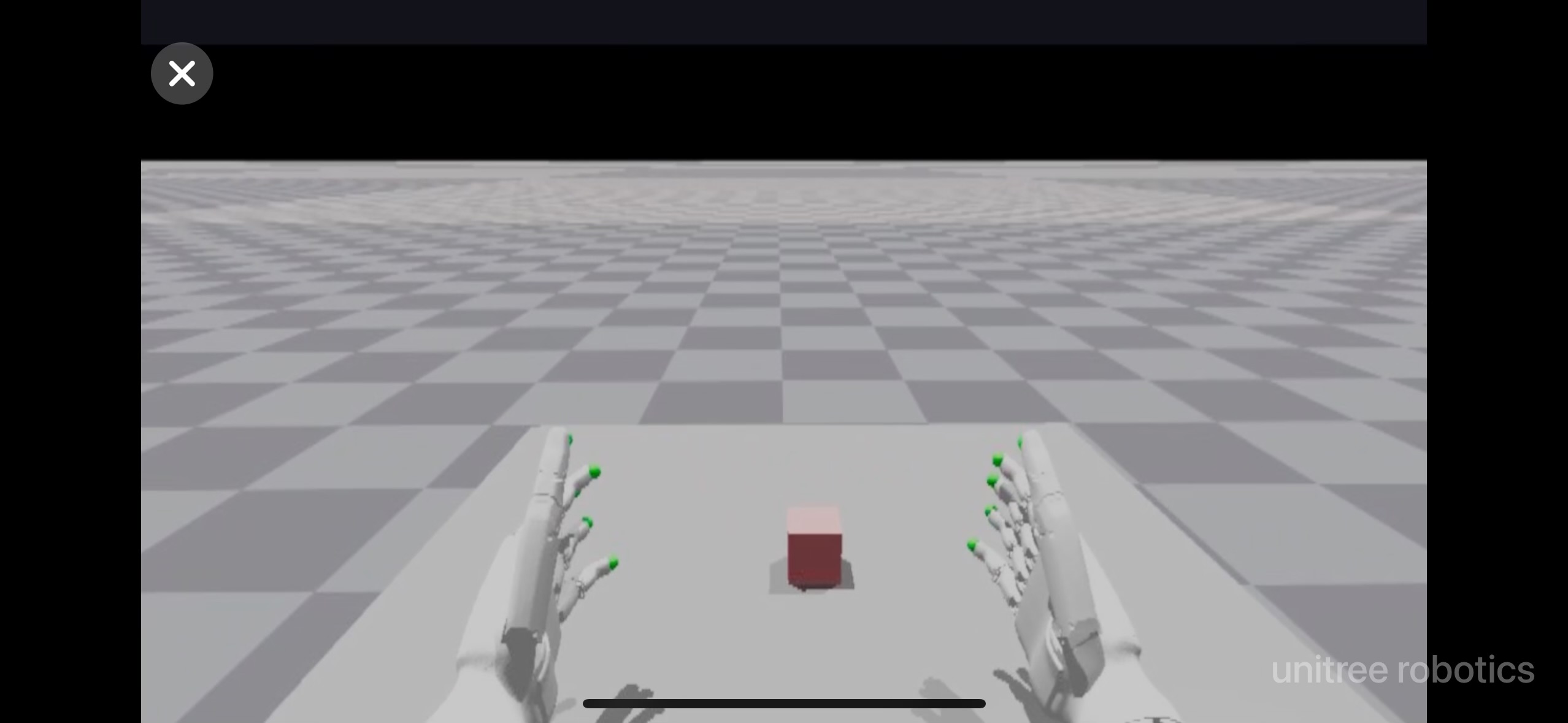
按照上述说明设置本地流媒体后,您可以尝试在 Isaac Gym 中远程操作两个机器人手:
cd teleop python teleop_test_gym.py -
戴上您的 Apple Vision Pro 设备。
-
在 Apple Vision Pro 上打开 Safari,访问:https://192.168.123.2:8012?ws=wss://192.168.123.2:8012
注意:此 IP 地址应与您的 主机 IP 地址匹配。
-
点击
Enter VR并选择Allow以启动 VR 会话。 -
在 3D 中看到您的手!
3. 🚀 使用方法
在开始此程序之前,请至少阅读一次 官方文档。
3.1 🖼️ 图像服务器
将 avp_teleoperate/teleop/image_server 目录中的 image_server.py 复制到宇树机器人(G1/H1/H1_2 等)的 开发计算单元 PC2,并在 PC2 上执行以下命令:
# 提醒1:可以通过scp命令将image_server.py传输到PC2,然后使用ssh远程登录PC2后执行它。
# 提醒2:目前该图像传输程序是为双目RGB相机配置的。
# 现在位于宇树机器人 PC2 终端
python image_server.py
# 您可以看到终端输出如下:
# 图像服务器已启动,等待客户端连接...
# 图像分辨率:宽度为 x,高度为 x
在图像服务启动后,您可以在 主机 终端上使用 image_client.py 测试通信是否成功:
python image_client.py
3.2 ✋ Inspire 手部服务器(可选)
您可以参考 灵巧手开发 配置相关环境并编译控制程序。首先,使用 此链接 下载灵巧手控制接口程序,然后将其复制到宇树机器人的PC2。
在宇树机器人的 PC2 上,执行命令:
sudo apt install libboost-all-dev libspdlog-dev
# 构建项目
cd h1_inspire_service && mkdir build && cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make
# 终端 1. 运行 h1 inspire 手部服务
sudo ./inspire_hand -s /dev/ttyUSB0
# 终端 2. 运行示例
./h1_hand_example
如果两只手连续打开和关闭,则表示成功。一旦成功,关闭终端 2 中的 ./h1_hand_example 程序。
3.3 🚀 启动
- 所有人员必须与机器人保持安全距离,以防止任何潜在的危险!
- 在运行此程序之前,请确保至少阅读一次 官方文档。
最好有两名操作员来运行此程序,称为 操作员 A 和 操作员 B。
现在,操作员 B 在 主机 上执行以下命令:
python teleop_hand_and_arm.py
然后,操作员 A:
-
戴上您的 Apple Vision Pro 设备。
-
在 Apple Vision Pro 上打开 Safari,访问:https://192.168.123.2:8012?ws=wss://192.168.123.2:8012
注意:此 IP 地址应与您的 主机 IP 地址匹配。
-
点击
Enter VR并选择Allow以启动 VR 会话。
当主机终端输出“Please enter the start signal (enter 'r' to start the subsequent program):”时,操作员 B 可以在终端中按下 r 键以启动远程操作程序。
此时,操作员 A 可以远程控制机器人的手臂和灵巧手。
接下来,操作员 B 可以在打开的“record image”窗口中按 s 键开始录制数据,再次按 s 键停止。可以根据需要重复此操作进行多次录制。
注意:录制的数据默认存储在
avp_teleoperate/teleop/data中,使用说明见此仓库: unitree_IL_lerobot。
3.4 🔚 退出
为了避免损坏机器人,最好确保操作员 A 将机器人手臂摆放为自然下垂或其他恰当位置后,**操作员B **再按 q 退出。
要退出程序,操作员 B 可以在“record image”窗口中按下 q 键。
4. 🗺️ 代码库教程
avp_teleoperate/
│
├── assets [存储机器人 URDF 相关文件]
│
├── teleop
│ ├── image_server
│ │ ├── image_client.py [用于从机器人图像服务器接收图像数据]
│ │ ├── image_server.py [从摄像头捕获图像并通过网络发送(在机器人板载计算单元上运行)]
│ │
│ ├── open_television
│ │ ├── television.py [使用 Vuer 从 Apple Vision Pro 捕获腕部和手部数据]
│ │ ├── tv_wrapper.py [对捕获的数据进行后处理]
│ │
│ ├── robot_control
│ │ ├── robot_arm_ik.py [手臂的逆运动学]
│ │ ├── robot_arm.py [控制双臂关节并锁定其他部分]
│ │ ├── robot_hand_inspire.py [控制因时灵巧手]
│ │ ├── robot_hand_unitree.py [控制宇树灵巧手]
│ │
│ ├── utils
│ │ ├── episode_writer.py [用于记录模仿学习的数据]
│ │ ├── mat_tool.py [一些小的数学工具]
│ │ ├── weighted_moving_filter.py [用于过滤关节数据的滤波器]
│ │
│ │──teleop_hand_and_arm.py [遥操作的启动执行代码]
| |——teleop_test_gym.py [可用于验证环境是否正确安装]
5. 🙏 鸣谢
该代码基于以下开源代码库构建。请访问以下链接查看各自的许可证:
- https://github.com/OpenTeleVision/TeleVision
- https://github.com/dexsuite/dex-retargeting
- https://github.com/vuer-ai/vuer
- https://github.com/stack-of-tasks/pinocchio
- https://github.com/casadi/casadi
- https://github.com/meshcat-dev/meshcat-python
- https://github.com/zeromq/pyzmq
- https://github.com/unitreerobotics/unitree_dds_wrapper
- https://github.com/tonyzhaozh/act
- https://github.com/facebookresearch/detr
- https://github.com/Dingry/BunnyVisionPro